


RGB画像+測距データを単眼で実現
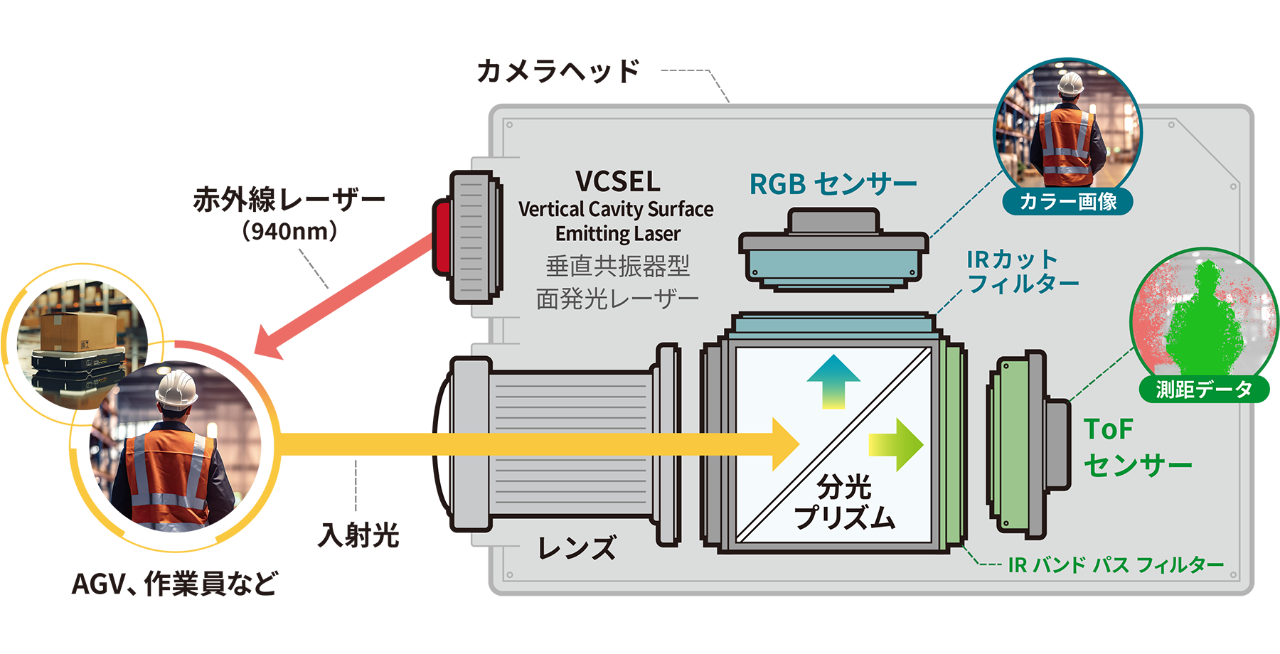
JVCケンウッドのセンサーフュージョンカメラは、「RGBセンサー」と「ToFセンサー」の異なるセンサーデータを融合し、RGB画像と測距データを同時に取得します。3次元計測や物体検出などに最適化したカメラであり、LiDARをはじめとする既存の測距技術やステレオカメラでのAI画像解析代替え利用も可能です。
JVCケンウッド独自技術

同光軸システム(単眼化)
業務用カメラで培ったカメラ画像処理技術と光学技術を応用し、RGBセンサーとToFセンサーの光軸を高精度に合わせる同光軸システムを開発。単眼でRGB画像と測距データの同時取得を実現しています。
また、単眼化により、ステレオカメラで発生していたデータのタイムラグと正確な位置角度の調整といった複雑なキャリブレーションが不要となり、瞬時に正確なデータを取得します。
ユースケース
RGB画像に測距データが加わることで、AI画像処理の高精度化、正確な3次元計測が実現。
ロボティクス、ドローン、セキュリティ、AR/VR、スマートシティのインフラなど、幅広い応用が期待されています。
自動運転/自律運転、ロボティクス等の眼となる
自動運搬装置などの視覚システムの向上、周囲の障害物検知や地形解析、SLAM*技術の発展に活用が可能です。
* SLAM=Simultaneous Localization and Mapping(自己位置推定と環境地図作成を同時に行う技術)
マテリアルハンドリング機器


AGV/AMR
- 2つのセンサーを1台のカメラに集約し、Visual SLAMを最小限の部品点数で実現
- 赤外線干渉を受けずに、高度な障害物回避機能を提供
- リアルタイムの環境モニタリングとフィードバックにより、安全かつ最適ルートの走行
FAロボット

協働ロボット
- 単眼化で、物体形状に左右されない安定した測距データ取得が可能に
- リアルタイムに高精度な画像・点群データを提供し、ロボットアームの自律制御精度・安全性を向上
- ロボットビジョンをセンサーフュージョンカメラに統一し、移動式協働ロボットのメンテナンスを簡易化
農機/建機


油圧ショベルなど
- 広角で周辺状況を把握し、作業領域の拡大と危険エリア設定精度の向上
- カメラヘッドの分離による設置スペース制約の解決、過酷な温度環境下での利用も可能
- 測距データ取得時に霧や外乱光による影響を低減
特長
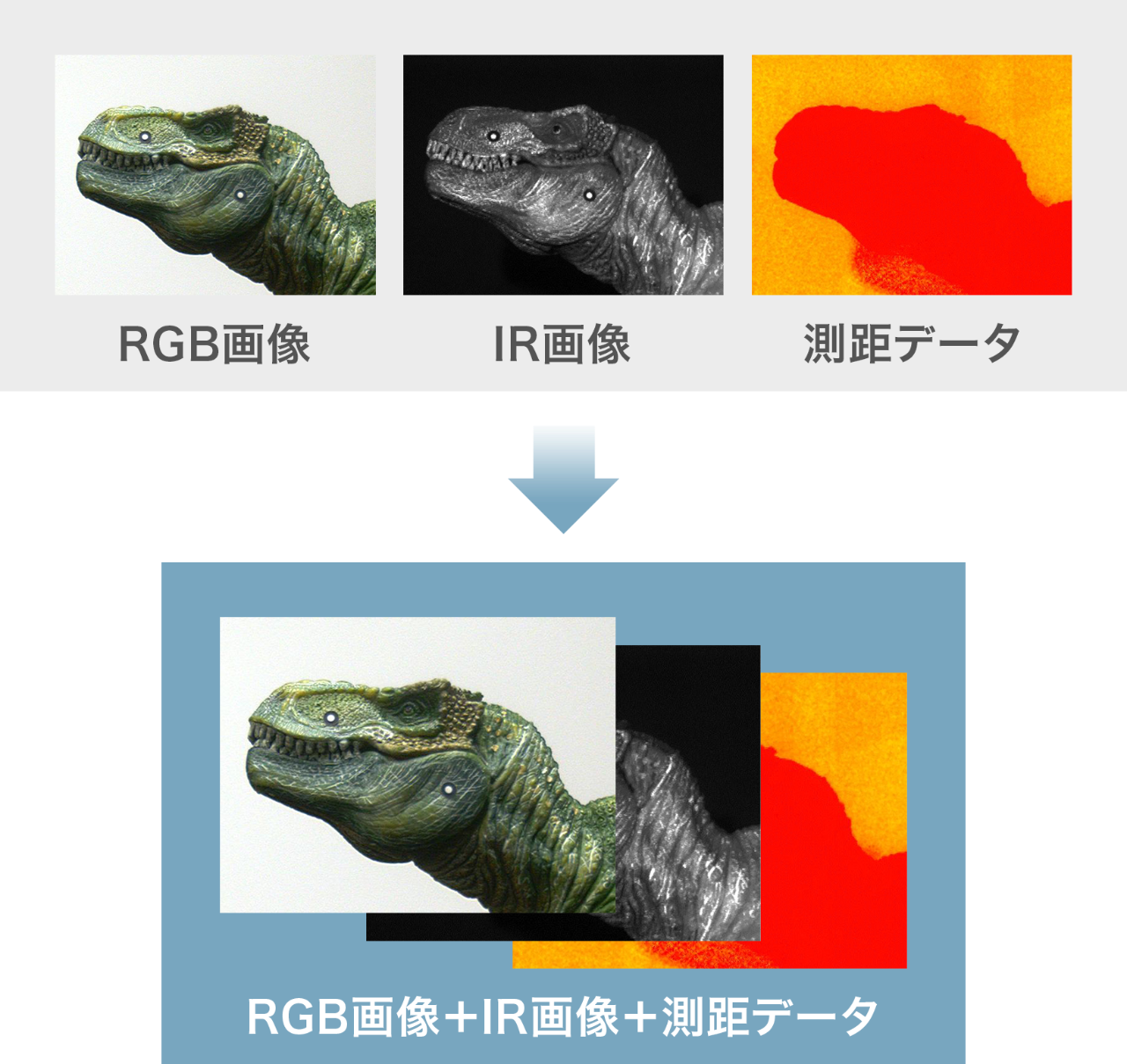
単眼でRGB画像と測距データを同時取得
独自開発の同光軸システムにより、RGB画像と測距データ(+IR画像)を同時に取得します。(ToFセンサーより測距データとIR画像が同時出力)

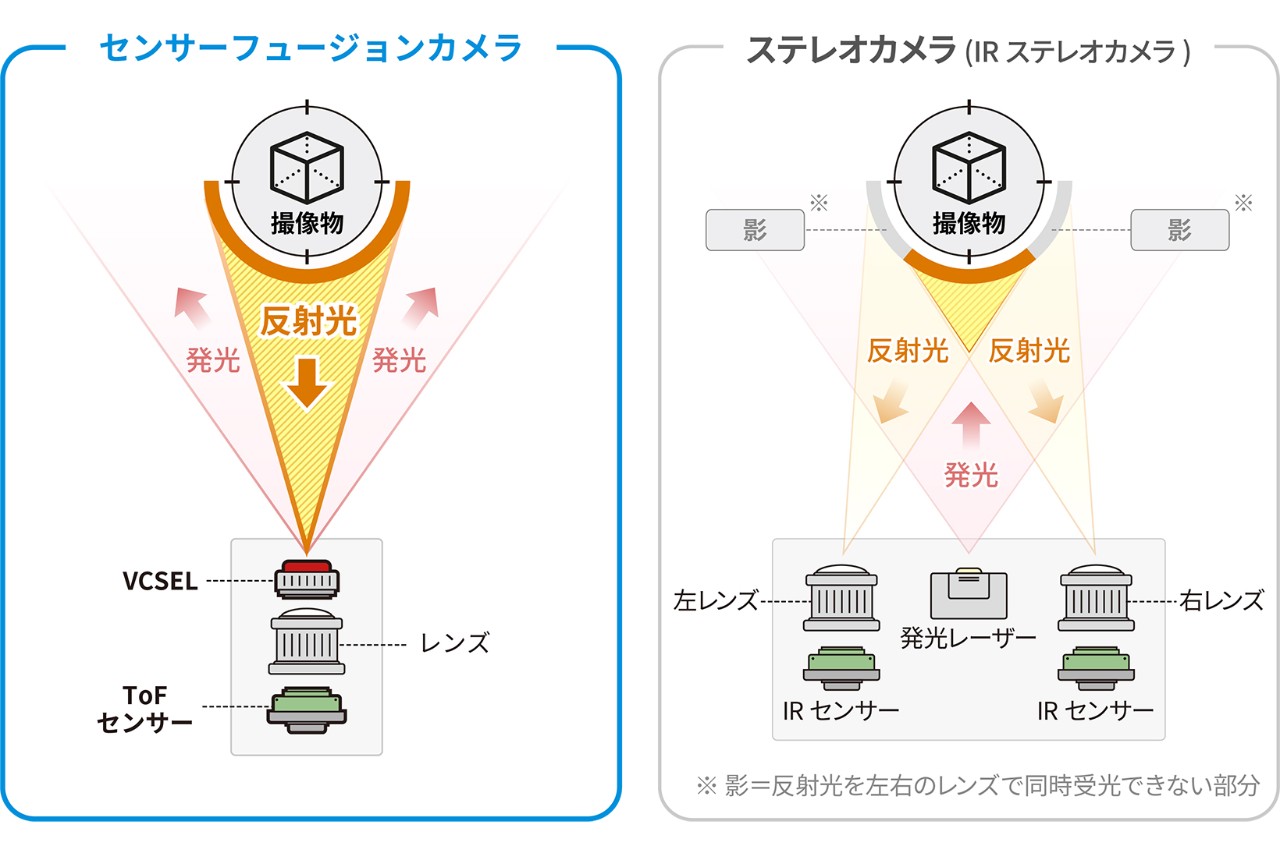
RGB画像+測距データの視差を回避
カメラを単眼にすることで、ステレオ(2眼)カメラで必要だった複雑なキャリブレーションが不要となり、視差ずれの同期をとるための処理工数が大幅に削減されます。そのため、同期ずれのない高精度なデータをリアルタイムで取得します。
単眼にて反射光を受光することで物体を面で捉えます。左右のIRセンサーで反射光を受光するステレオカメラに比べ、物体の形状に左右されずに測距データの取得が可能です。そのため3次元モデル生成時に必要なデータの欠落を防ぎ、シミュレーションや分析に用いる精度の高いデジタルツインの提供に寄与します。

ToFの赤外線干渉を最小限に
ToFセンサーの赤外線干渉を最小限に抑えることで、干渉による測距データの誤差を低減し、信頼性の高い測定結果を得ることができます。
ベースモデルプロダクト外観・仕様

内容物
- カメラヘッド
- キャリアボード
- USB(Type-C)ケーブル
- キャリアボード電源ケーブル・ACアダプタ
- 録画用SSD
- SDKソフトウェア
- BSP(NVIDIA JetPack SDK)
- SDKマニュアル
ベースモデル カメラモジュール仕様
| 項目 | 仕様 |
|---|---|
| 視野角(FoV) | RGB(水平 x 垂直):140° x 105° ToF(水平 x 垂直):140° x 105° |
| フレームレート | RGB 30fps(標準)、ToF 30fps(標準) ※要望により調整可能 |
| 解像度 | RGB(水平 x 垂直):1440 x 1080 ToF(水平 x 垂直):640 x 480 |
| 測距範囲 | 0.3m~8m |
| 測距精度 | ±2%以内 |
| 外寸 | W50×H70×D65(mm) ※レンズ前玉部除く。コネクタ含まず |
| 質量 | 260g以下 |
| 出力I/F | 差動信号V-by-One |
| 出力I/Fコネクタ | USB(Type-C)(x1) |
| FAN | FANあり |
| 動作温度 | 0℃~45℃ |
| 保存温度 | -20℃~+50℃ |
| 電源電圧 | DC12V~24V |
| 消費電力 | 20W(目標) |
| 外装 | 金属(アルミ) |
| 添付物 | USB Type-Cケーブル |
※上記仕様及び外観は、予告なく変更されることがあります。
※当社SDKを使って映像データを取得することができます。
JVCケンウッドでは技術評価および、デモンストレーションのためベースモデルプロダクトの貸出機の提供を行っています。
貸出機ご利用希望のお客様は下記よりお問い合わせください。
